海外製品・コンサルテーションサービス UNIPOS(ユニポス) > ソフトウェア > 数物系科学 > FORCESPRO | モデル予測制御(MPC) 組み込みシステム最適化 ソルバー
FORCESPRO | モデル予測制御(MPC) 組み込みシステム最適化 ソルバー

- モデル予測制御(MPC)と組み込みシステム最適化のためのソルバー
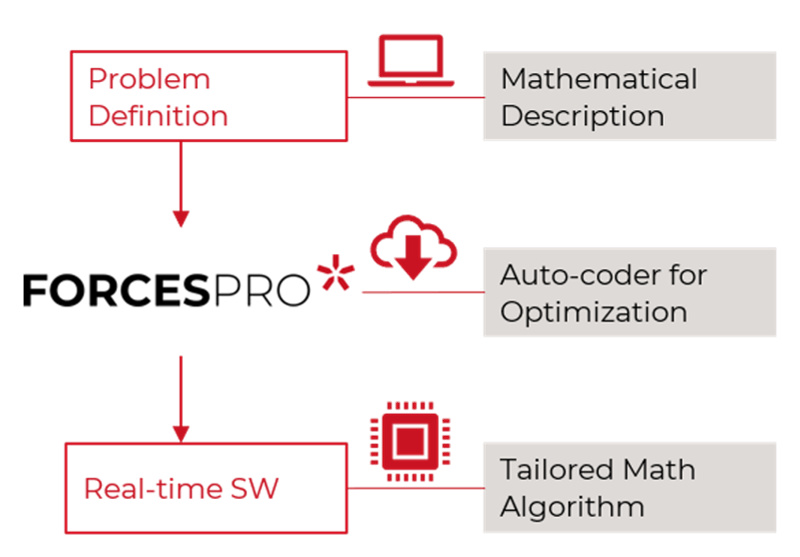
- embotech社のFORCESPROは、モデル予測制御(MPC, Model Predictive Control)と組み込みシステム最適化のための、高速で信頼性の高いソルバーです。
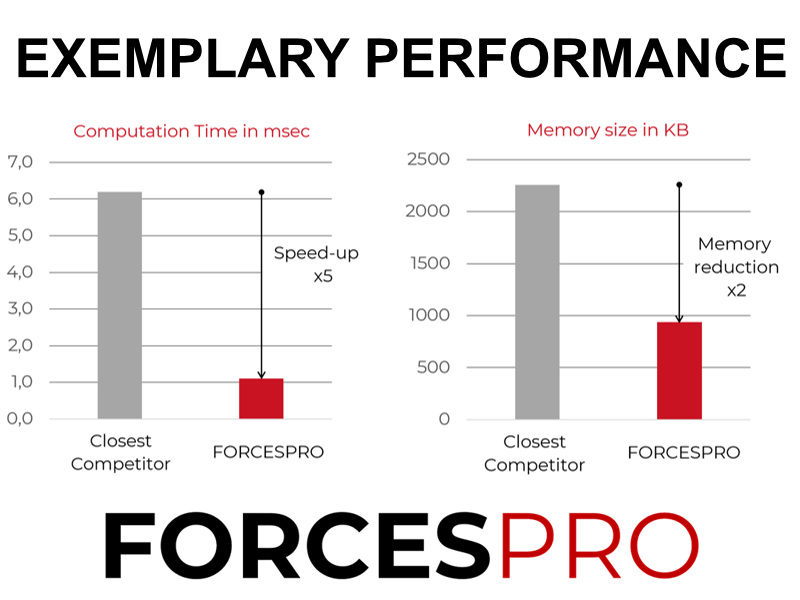
最適制御問題の数学的構造のために特別に開発された最先端の数値最適化アルゴリズムにより、 複雑な最適化問題をミリ秒単位で解決します。
この最速のソルバーはファイルサイズも非常に小さく、任意のハードウェアプラットフォームに埋め込み、 安全性、生産性、エネルギー効率を大幅に向上させることができます。
例えば自動運転(自動車の動作計画とエネルギー管理)、ロケットのガイダンスや動作計画、風力タービンのピッチ制御、 板金レーザー切断、ロボットアームの動作計画などで使用されています。
主な用途
- フィードバック制御や最適制御の研究開発
- 多関節ロボットや自律移動ロボットの制御
- 無人航空機や宇宙探査ローバーの自律制御
- 自動運転車やエレクトリックビークルの制御
- 大規模な最適化問題や制約付き最適化問題の解法
- 工場の生産ラインや化学プラントのプロセス制御
- 太陽光発電システムやスマートグリッド向けの制御
- 生体メカニズムの解析や人工臓器の制御
検索キーワード:
FORCES-pro / FORCES pro / シリアルアプリケーション / シリアル機器 / シリアル制御 / MISRA-C準拠 / Motor Industry Software Reliability Association / Nonlinear Program (NLP) / Mixed-Integer NLP (MI-NLP) / Linear Program (LP) / Quadratic Program (QP) / Quadratic-Constrained Quadratic Program (QCQP) / Binary-Integer QPs / Linear MPC / Nonlinear MPC / Hybrid MPC / Economic MPC / Motion Planning Problems / Autonomous Decision Making / モデル予測制御ツールボックス

- メーカー
- embotech AG
FORCESPRO | モデル予測制御(MPC) 組み込みシステム最適化 ソルバーの見積もり・問い合わせ
「製品について」「導入までの流れ」「価格・お見積り」など、お気軽にお問合せ下さい。
| 商品名 | 納品方法 | 納期 | 価格 | |
|---|---|---|---|---|
| FORCESPRO (ご希望のライセンス形態をお知らせください) | 電子デリバリー | お問い合わせください | お問い合わせください | |
| サポートパック あんしんプラス(オプション) | 製品価格の5~10%/年 | |||
| サポートパック あんしんプラスとは? |
ご希望の商品にチェックを入れてボタンをクリックすることで、 該当商品をお見積もりフォームへ追加できます。納品方法については こちらをご覧ください。
FORCESPRO | モデル予測制御(MPC) 組み込みシステム最適化 ソルバーの商品説明
【ライセンス形態】
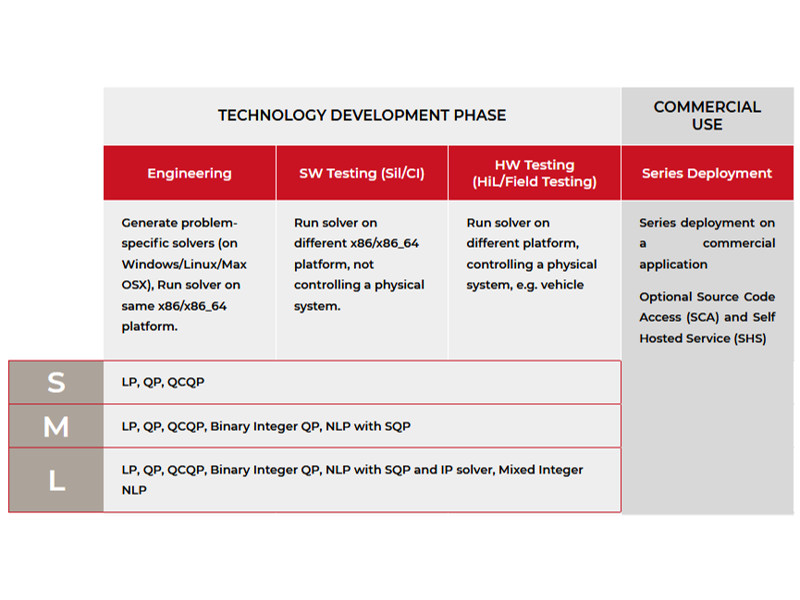
プロジェクト(技術開発)の段階に応じた3つの異なるノードがあります。
各ノードは、S、M、L それぞれの線形計画法のアルゴリズムで利用できます。
--------------------------------------------------
NODE TYPES … 技術開発フェーズ(モデルベーステスト)
- Engineering:
問題固有のソルバーを生成し、同じx86/x86_64プラットフォームでソルバーを実行
※ Windows / Linux / Max OSXの場合
- SoftWare Testing (Sil/CI)
物理システムを制御せず、異なるx86/x86_64プラットフォームでソルバーを実行
- HardWare Testing (HiL/Field Testing)
異なるプラットフォームでソルバーを実行し、車両等の物理システムを制御
--------------------------------------------------
VARIANT … 線形計画法のアルゴリズム
- S: LP, QP, QCQP
- M: LP, QP, QCQP, Binary Integer QP, NLP with SQP
- L: LP, QP, QCQP, Binary Integer QP, NLP with SQP and IP solver, Mixed Integer NLP
LP(Linear Programming /線形計画問題)
QP(Quadratic Programming) … 二次計画問題
QCQP(Quadratically Constrained Quadratic Program) …二次制約付き二次計画問題
Binary Integer QP … 整数計画問題
NLP with SQP … SQP用いたNLP(Nonlinear Programing)ソルバー
NLP with SQP and IP solver … SQP-IPを用いたNLP(自然言語処理)ソルバー
Mixed Integer NLP(Nonlinear Programing) … 混合整数非線形計画問題
--------------------------------------------------
commercial use
オプション:
- SCA (ソースコードアクセス)
- SHS (セルフホストサービス)
※商用アプリケーションでのシリーズ展開も可能です。
embtech社では、アプリケーションとニーズをよりよく理解したうえで
設定に対しての適切なご提案をしております。
ヒアリングが必要となりますため、ご要望やご相談につきましては
別途お問い合わせください。
【主な特長と利点】詳細はこちら(メーカーページ)
・数理最適化問題※1を瞬時に解くための、高速※2で信頼性の高い数値解法
・コードサイズが小さくメモリの使用量が少ないため埋め込みが容易
・任意のハードウェアプラットフォームで実行可能
・信頼性が高く完全自律システムへの適用が可能
・モデル予測制御の業界標準(シリアルアプリケーションで多数の実績あり)
・MathWorks Model Predictive ControlToolbox に統合可能
・MISRA-C準拠(高いコーディング標準に準拠)
※1 組み込みシステム最適化に必要な関連性の高い最適化問題の処理が可能
最適化問題の種類
- Nonlinear Program (NLP, 非線形計画問題)
- Mixed-Integer NLP (MI-NLP, 混合整数二次計画問題)
- Linear Program (LP, 線形計画問題)
- Quadratic Program (QP, 二次計画問題)
- Quadratic-Constrained Quadratic Program (QCQP, 二次制約付き二次計画問題)
- Binary-Integer QPs (2進整数計画問題)
組み込みシステムの例
- 線形モデル予測制御 (Linear MPC)
- 非線形モデル予測制御 (Nonlinear MPC, NMPC)
- ハイブリッドモデル予測制御 (Hybrid MPC)
- 経済的モデル予測制御 (Economic MPC)
- 動作計画(モーションプランニング)の問題 (Motion Planning Problems)
- 自律的な意思決定 (Autonomous Decision Making)
※2 さまざまなアプリケーションでのFORCESPROの一般的な計算時間(参考)
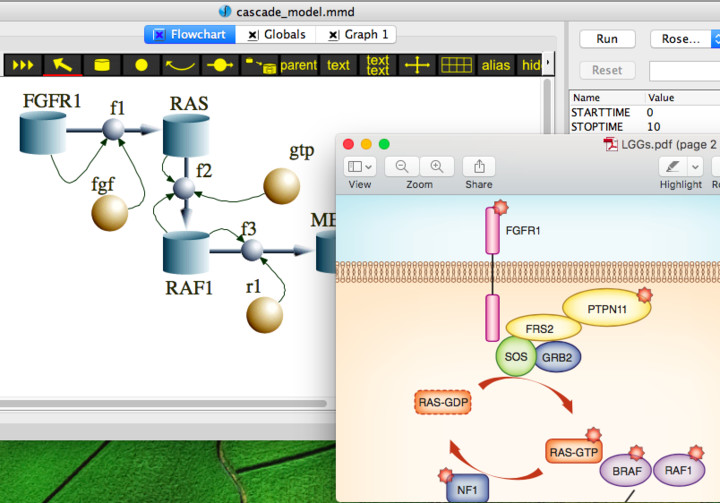
- ロボット動作計画:1ミリ秒 (例:Robotic Arm Manipulator (MATLAB & Python))
- 自動車の経路計画:8ミリ秒 (例:Obstacle avoidance (MATLAB & Python))
- 宇宙船ランデブー:1ミリ秒 (例:Low-level interface: Spacecraft Rendezvous)
【最適化手法】
最適化アルゴリズム
アプリケーションに最適な方法を2つのアルゴリズムから選択可能
- Interior-Point Solver (IP)
少ない反復回数で収束するまでNLPを解くことが可能
最大計算時間が重要な組み込みシステム制御に有効
- Sequential Quadratic Programing (SQP)
非線形モデル予測制御のための高速な実時間最適化が可能
利用可能な計算時間や計算能力が小さい場合でもリアルタイムの実装が可能
高速フィードバックレートを必要とする組み込みシステム制御に有効
Derivative Generation
- CASADI
- Mathworks Symbolic Toolbox
- User-made functions
ヘッセ行列(Hessian)
- Blockwise BFGS
- Gauss-Newton
【ハードウェア要件】
実行可能なプロセッサ/プラットフォーム
- x86 (Windows、Mac、Linux)
- ARM-Cortex
- PowerPC (GCC toolchain)
- NVIDIA SoC
- Speedgoat real-time platform
- dSPACE MicroAutoBoxII and III
- dSPACE Autobox
※ 上記以外のプロセッサ/プラットフォームも可能です。お気軽にお問合せ下さい。
【インターフェース】
ソルバーの生成
- MathWorks / MATLAB
- MathWorks / Model Predictive Control Toolbox?
- Python
ソルバーの実行環境
- MathWorks /MATLAB
- MathWorks /Simulink
- MathWorks / Model PredictiveControlToolbox
- C / C ++
- Python
メーカー
-
embotech AG
https://www.embotech.com/
動画
ご注文の流れ

- 商品詳細をご確認の上「今すぐお見積もり・お問い合わせ」ボタンをクリック
- 見積もりフォームへ必要事項を記載の上、送信ください
- 弊社よりメールにてお見積りをご提示します
- メールへの返信にてご注文の旨をお知らせください
- 商品代金のお支払いをお願いします(次項の「支払い方法」をご覧ください)
- 配送、またはメール(電子デリバリー)にて商品をお届けします
支払い方法
- 法人掛売り(※) :
納品・請求書による後払いです。
ご注文手続きはお見積もりメールへの返信のみでけっこうです。 - 銀行振込:
ご注文の返信メールをいただいた後、弊社指定の銀行口座へのお振込みを確認した時点で注文の確定とさせていただきます。
※法人掛売りでのお支払いについては一定の条件がございます
お支払い方法の詳細はお見積もりメールに記載しておりますので、ご確認ください。
FORCESPRO | モデル予測制御(MPC) 組み込みシステム最適化 ソルバーの見積もり・問い合わせ
「製品について」「導入までの流れ」「価格・お見積り」など、お気軽にお問合せ下さい。
| 商品名 | 納品方法 | 納期 | 価格 | |
|---|---|---|---|---|
| FORCESPRO (ご希望のライセンス形態をお知らせください) | 電子デリバリー | お問い合わせください | お問い合わせください | |
| サポートパック あんしんプラス(オプション) | 製品価格の5~10%/年 | |||
| サポートパック あんしんプラスとは? |
ご希望の商品にチェックを入れてボタンをクリックすることで、 該当商品をお見積もりフォームへ追加できます。 納品方法についてはこちらをご覧ください。
ユニポスはFORCESPRO | モデル予測制御(MPC) 組み込みシステム最適化 ソルバーの調達販売を行い、海外製品調達に関するお困りごとを解決するサービスです。 詳しくはこちら。
FORCESPRO | モデル予測制御(MPC) 組み込みシステム最適化 ソルバーをご覧の方におすすめの商品
-

数理計画ソフトウェア
GAMS (The General Algebraic Modeling System) | 数理計画 供給計画 ソフトウェア -
高速に数理モデルを解く、グラフィカル微分方程式ソルバー
Berkeley Madonna | 数理モデル 汎用微分方程式 ソルバー -

NVIDIA DRIVE PXシリーズ用のADASカメラ
SEKONIX Camera | NVIDIA DRIVE PXシリーズ ADASカメラ -
ハイブリッド・EVのための車両電流・電圧計測ソリューション
Klaric 社製 電圧・電流計測器 | 電気自動車 向け 高電圧/低電圧 計測モジュール -

-

自動車等の組込み通信アーキテクチャの設計、設定、シミュレーションツール
RTaW-Pegase | 組込みシステム向け 設計自動化プラットフォーム
このメーカーの他の商品を見る
FORCESPRO | モデル予測制御(MPC) 組み込みシステム最適化 ソルバーレビュー
返品・交換について
海外製品のため、ご注文後のキャンセル、ご返品はお受けできません。
ただし「納品後一週間以内」の初期不良品については、正常動作の同品もしくは同等品と無償交換させていただきます。万一在庫切れの場合は同等品交換もしくは全額返金いたします。