研究初期・プロトタイピング向け|試作を加速する厳選5製品|UNIPOS
研究初期・プロトタイピング向け|試作を加速する厳選5製品
「まず動く状態」を最短で作るために、試作/制御/センサ/組込み/開発環境の観点で厳選しました。
「研究初期〜試作立ち上げ」でつまずきやすいポイントを整理し、対策として有効な製品を 「課題」→「製品」 の順で紹介します。
まずは、現場で典型的に発生する課題を確認し、当てはまるものがあれば、該当する製品候補へ進んでください。 (迷う場合は 無料相談 で状況を共有いただければOKです)
このフェーズで起こりがちな課題
研究初期〜試作立ち上げは、仕様が固まりきらないまま「まず動かす」ことが優先されやすく、準備・検証・記録が同時多発しがちです。 その結果、手戻りや原因切り分けに時間を取られ、反復速度が落ちます。
- ✅ 環境準備・部材選定・制御系の立ち上げで「まず動かす」まで時間がかかる
- ✅ 制御・センサ・組込みが同時進行になり、検証が前に進みにくい
- ✅ クラウド依存が高く、反復速度が落ちる
- ✅ 実験・検証ログや設定が散らばり、再現・引き継ぎが難しくなる
- ✅ 実機デバッグの回数が増え、原因切り分け(ソフト/ハード/ネットワーク)が長期化しやすい

厳選!研究初期・プロトタイピングフェーズの代表5製品
上記のような課題を「準備を短縮する」「検証を回す」「原因を切り分ける」の観点で分解し、 対策として有効な製品を5つに絞って紹介します。該当しそうな項目があれば、ぜひ参考にしてください。 (迷う場合は 無料相談 をご活用ください)

飛行制御やセンサ統合の検証を、研究初期から反復しやすくします。
- 飛行制御アルゴリズムの試作
- 屋内位置推定・追従などの検証
- 小型プラットフォームでの実験反復
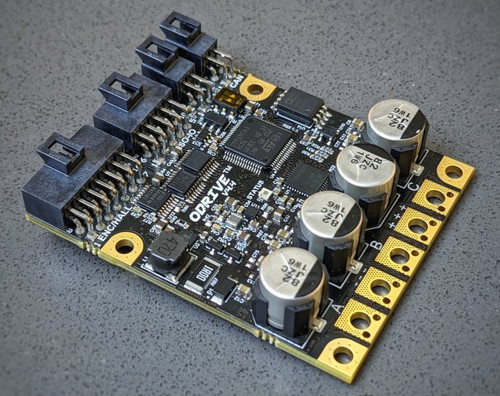
駆動系を素早く立ち上げ、制御の検証サイクルを短縮します。
- アクチュエータ制御の評価
- 試作機の位置・速度制御
- メカ試作の反復(手戻り削減)

触覚情報を取り入れた把持・操作の検証を具体化しやすくします。
- 把持・操作(Manipulation)の研究
- 接触状態の検出と推定
- 触覚を用いた学習データ収集
組込み/エッジ側の立ち上げ時間を短縮し、I/O検証を前に進めます。
- MCU/SoC評価・周辺I/O検証
- エッジAI・IoT試作
- デバイス統合の前段テスト
クラウド依存を減らし、ローカルで検証を回して開発スピードを上げます。
- サーバレス/APIの開発・検証
- 統合テストの土台づくり
- オフライン環境での反復検証
ここで紹介した5製品は、課題解決の代表例です。
UNIPOSでは、用途・ご予算・既存環境に合わせて、ほかの製品も含めて最適な候補をご提案できます。
「どこがボトルネックか分からない」「候補を絞りたい」という段階でもOK。状況を伺い、比較前提でご案内します。
例:目的(試作/制御/センサ/組込み/テスト)・使用予定の機材/言語/クラウド・期限感 だけでもOKです。
関連ページのご案内
ほかのフェーズの厳選製品や、全体像(ポータル)もあわせてご確認ください。
※ 研究初期は「まず動く状態」までの立ち上げで詰まりやすいフェーズです。状況に合う構成・製品候補を整理できます。
「何から揃えるべき?」「手元の機材で進められる?」の段階でもOK。前提(用途・想定・制約)から候補を絞ります。
例:用途(試作/制御/センサ/組込み)・既存環境(OS/言語)・期限感など