







- ロボットハンド
Linker Hand シリーズ
高自由度制御 精密把持動作 多指ロボットハンド

テガラは研究開発者向けの各種サービスを提供しております。お客様の目的、ご要望に応じた最適なサービスをお選びください。
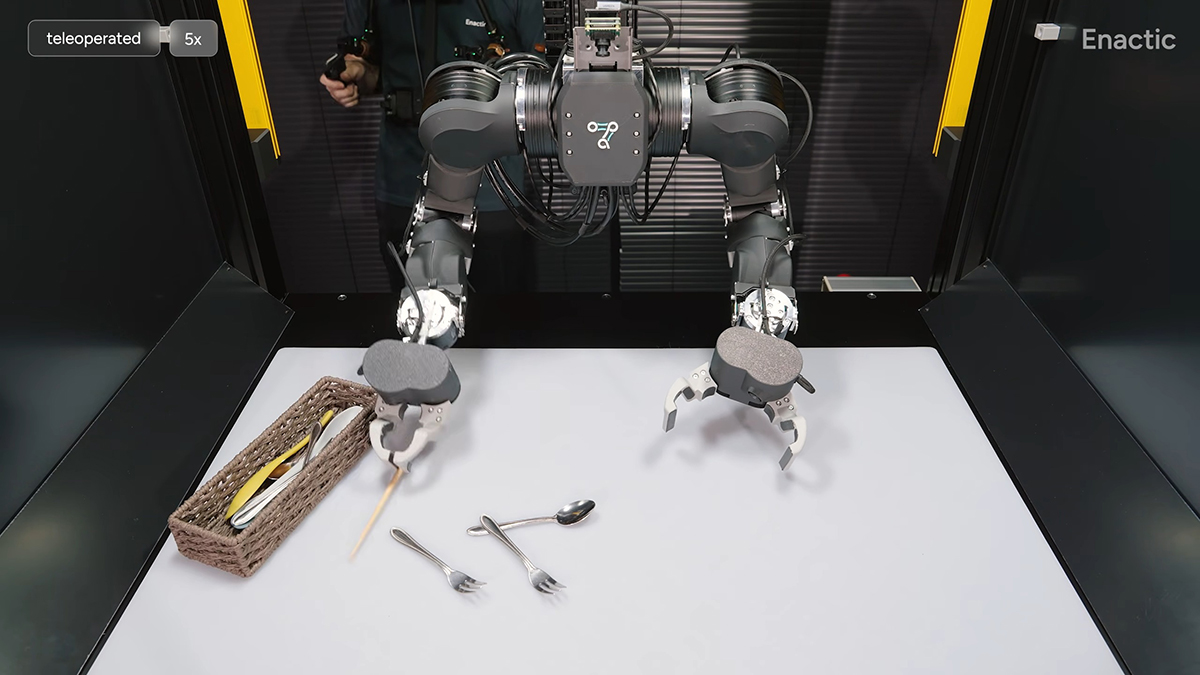
OpenArm 2.0 は、人の腕に近い構造と動作を備えた双腕型のヒューマノイドアームです。フィジカルAIやロボット学習の研究開発向けに提供されており、実機を用いた模倣学習や遠隔操作、マニピュレーション研究に活用できます。
オープンソースで公開されているハードウェアおよびソフトウェアを基盤とし、研究内容に合わせた拡張やカスタマイズが可能です。また、工場で組立と検査を行った状態で提供されるため、機体の製作に時間をかけることなく、データ収集やアルゴリズム開発、実機検証に取り組めます。
OpenArmシリーズの最新モデルである OpenArm 2.0 は、視覚情報を取得できるカメラ内蔵グリッパを備え、画像を用いた把持動作や物体操作の研究にも対応します。オープンソースの柔軟性と実機研究に求められる運用性を兼ね備えており、大学や研究機関はもちろん、フィジカルAI分野の研究開発を進める企業にも適したロボットプラットフォームです。
| 項目 | 仕様 |
|---|---|
| 自由度 | 片腕7 DOF、双腕合計14 DOF |
| アームリーチ | 606 mm |
| 質量 (片腕) | 5.5 kg |
| 定格可搬質量* | 4.1 kg |
| 最大可搬質量** | 6.0 kg |
| 制御 | 1 kHz CAN-FD リアルタイム制御 |
| 関節 | QDDバックドライバブル関節、各軸に機械的リミット搭載 |
| エンドエフェクタ | 2指ピンチグリッパ、インハンドカメラ搭載 |
| ビジョン | 内蔵RGBカメラ |
| 構造 | アルミニウム、ステンレススチール、MISUMIフレームベース |
| ベースプレート | 190 × 250 mm、厚さ8 mm、穴ピッチ30 mm、M6穴 × 48 |
OpenArm 2.0 は、Enacticによる公式モーター構成に準拠したモデルです。
各関節には、負荷、剛性、サイズ、制御性能に応じて選定されたDAMIAO製モーターを搭載しています。
| 項目 | 仕様 |
|---|---|
| 肩部・高負荷関節 | DM 8009 P |
| 上腕部・高負荷関節 | DM 4340 P |
| 肘部・中負荷関節 | DM 4340 |
| 手首部・小型関節 | DM 4310 |
| エンドエフェクタ | RGBカメラ内蔵2指ピンチグリッパ |
| 構成基準 | Enactic公式OpenArm 2.0モーター構成 |
OpenArm 2.0 は、上部ステレオカメラの有無に応じて2つの構成が提供されています。
ロボットアーム本体の仕様は共通のため、使用するビジョン環境に合わせて構成を選択できます。

研究開発に必要な視覚認識環境を含む構成。
カメラの設置や配線作業を省略できるため、導入後すぐに実機研究へ取り組みたいユーザーに適しています。

既存のカメラシステムを活用したいユーザー向けの構成。
用途に応じて独自のビジョンシステムを構築したい場合に適しています。
※グリッパ内蔵RGBカメラは、上部ステレオカメラとは別のカメラです。
※ZED-121210上部ステレオカメラは、「With Top Stereo Camera」構成にのみ含まれます。
グリッパ内部にRGBカメラを搭載し、把持対象をグリッパ視点で捉えられます。
視覚情報を取得しながら操作できるため、物体認識と把持動作を組み合わせた研究に適しています。
OpenArm 2.0の公式モーター構成に準拠しており、公式プロジェクトと同じ構成で研究を進められます。
関節ごとの役割に合わせてDAMIAO製モーターを採用し、双腕ロボット研究に求められる動作性能を支えます。
片腕7自由度の双腕構成により、人の腕に近い動作を再現できます。
単腕ロボットでは難しい協調動作や複雑なマニピュレーション研究にも対応します。
高速な制御ループにより、ロボット制御や遠隔操作の研究で重要となる応答性を備えています。
実機環境での動作検証やロボット学習の評価を高い頻度で実施できます。

Embodied AI研究やロボット学習向けに設計されたモジュラー型のリサーチセルです。
OpenArm 2.0 と組み合わせることで、実機実験に必要な観測環境や作業空間を構成できます。

OpenArm 2.0 を直感的に操作するために設計されたモーターレスのリーダーアーム。
※詳細仕様や3D CADデータ、部品表 (BOM) は今後公開予定となっており、リリース時期は未定です。
▶ OpenArm KER の概要はこちら (メーカードキュメント)
「ロボットマニピュレーション (Robotic Manipulation)」とは、ロボットが物体を認識し、把持、移動、操作するための技術および研究分野です。単純な位置決め動作だけでなく、対象物の状態や周囲の環境を考慮しながら作業を実行することを目的とします。物体把持、組立、仕分け、双腕協調作業など幅広い応用があり、近年は視覚認識や機械学習を組み合わせた研究も進められています。OpenArm 2.0 は、双腕構造とカメラ内蔵グリッパを備えており、ロボットマニピュレーション研究の実機環境として活用できます。
検索キーワード:
フィジカルAI / ロボット学習 / 模倣学習 / テレオペレーション / 遠隔操作ロボット / マニピュレーション研究 / 双腕協調制御 / ヒューマノイドロボティクス / ロボットアーム研究 / 実機ロボット学習 / Vision-Language-Action / VLAモデル / ロボットデータ収集 / 視覚認識ロボット / インハンドカメラ / RGBカメラ搭載グリッパ / ロボット制御開発 / CAN-FD制御 / 研究用ロボットプラットフォーム / AIロボティクス研究
| 商品名 | 納品方法 | 納期 | 価格 |
| 弊社より配送 | お問い合わせください | お問い合わせください | |
| 弊社より配送 | お問い合わせください | お問い合わせください |
ご希望の商品にチェックを入れてボタンをクリックすることで、
該当商品をお見積もりフォームへ追加できます。
製品仕様・価格・導入手順など、お気軽にお問い合わせください
(通常、1営業日以内に回答いたします)
「探す」ページより、ご希望の商品を検索してください。
ご希望の商品が見つかりましたら、商品名をクリックし詳細ページをご覧ください。

表示された商品情報をご覧いただき、商品内容やエディション、価格などをご確認ください。
ご希望の商品名のチェックボックスにチェックを入れていただくと商品名がフォームに自動入力されます。

ここで商品名や数量、ご希望のオプションやその他のご要望、ご質問、
お客様情報など必要事項をご記入いただき、「送信する」ボタンを押してください。

お客さまからのお問い合わせを受理しだい、弊社スタッフよりお見積もりをメールにてお送りします。
お見積もり内容をご確認後、ご注文いただけるようでしたら、弊社からのお見積もりメールへのご返信にて、ご注文の旨をお知らせください。

ハードウェア、パッケージソフトウェア等は弊社より宅配便でお届けいたします。
ご注文いただいた商品がダウンロードソフトウェアやライセンス、レポート等の場合は「電子デリバリー」にてお届けいたします。

ご注文の流れの詳細はこちら
※ 返品・交換について
海外製品のため、ご注文後のキャンセル、ご返品はお受けできません。
ただし「納品後一週間以内」の初期不良品については、正常動作の同品もしくは同等品と無償交換させていただきます。
万一在庫切れの場合は同等品交換もしくは全額返金いたします。
ユニポスはOpenArm 2.0の調達販売を行い、海外製品調達に関するお困りごとを解決するサービスです。 詳しくはこちら。
納品・請求書による後払いです。
ご注文手続きはお見積もりメールへの返信のみでけっこうです。
ご注文の返信メールをいただいた後、弊社指定の銀行口座へのお振込みを確認した時点で注文の確定とさせていただきます。
※法人掛売りでのお支払いについては一定の条件がございます。
お支払い方法の詳細はお見積もりメールに記載しておりますので、ご確認ください。

Linker Hand シリーズ
高自由度制御 精密把持動作 多指ロボットハンド
ODrive Pro / ODrive S1
高性能 DCモータコントローラ (ODrive Robotics)

OpenArm V1.1
オープンソース設計 双腕ヒューマノイド 研究開発プラットフォーム

Neobotix社製モバイルロボット
ロボットアーム搭載 自動輸送ロボット モバイルマニピュレータ

COEX Clover drone kit (ドローンキット)
プログラマブル クアッドコプター STEAM教育

TITA / Diablo
ダイレクトドライブ アクチュエータ モバイルロボット 車輪付き二脚