




- 遠隔操作
Linker Hand シリーズ
高自由度制御 精密把持動作 多指ロボットハンド

テガラは研究開発者向けの各種サービスを提供しております。お客様の目的、ご要望に応じた最適なサービスをお選びください。
オープンソース設計 双腕ヒューマノイド 研究開発プラットフォーム


メーカー
Shenzhen WowRobo Robotics Co., Ltd.
製品仕様・価格・導入手順など、お気軽にお問い合わせください
(通常、1営業日以内に回答いたします)
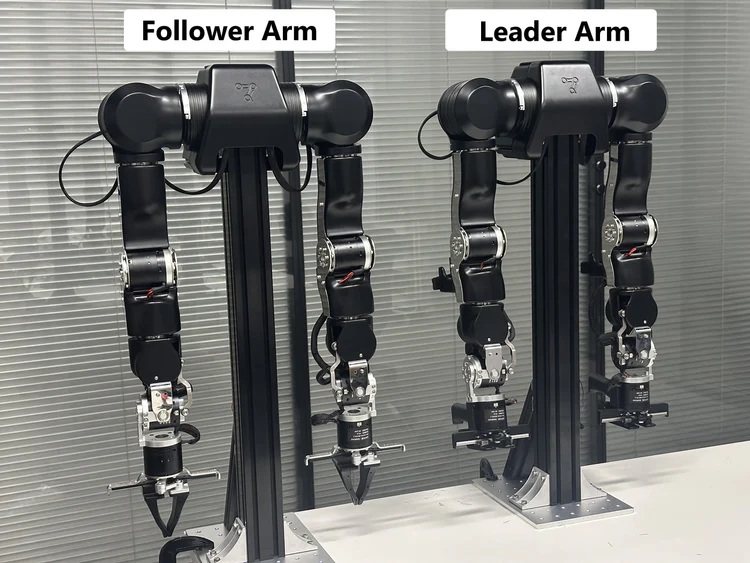
OpenArm は、ヒューマノイドロボットの研究開発用に設計されたオープンソースのロボットアームです。機構設計から制御ソフトウェアまでが公開されているため、研究内容に応じて構成を柔軟に調整でき、自律制御や遠隔操作、模倣学習など幅広いテーマに対応します。
本体には高精度なCNC加工部品が用いられており、表面には耐久性を高める処理が施されています。さらに、配線まわりにも専用設計を採用することで、長時間の運用や繰り返しの実験においても安定した状態を維持しやすく、研究開発で扱いやすい構成となっています。
実機を用いたデータ取得からアルゴリズムの検証までを一貫して進めたい場合に適しており、物理環境でのAI研究を効率的に進めるための基盤として活用できます。開発の自由度と運用の安定性を両立した、研究用途に適したロボットアームです。
OpenArmシリーズには、最新モデルの「OpenArm 2.0」が提供されています。
カメラ内蔵グリッパや公式モーター構成を採用し、フィジカルAIやロボット学習向けプラットフォームとして機能が強化されています。
また、OpenArm V1.1 をお使いの方向けに、「OpenArm 1 to 2 Upgrade Kit」も用意されています。
既存機体を活用しながら、OpenArm 2.0 の主要な機能へ移行したい場合にご利用いただけます。
| 項目 | 仕様 |
|---|---|
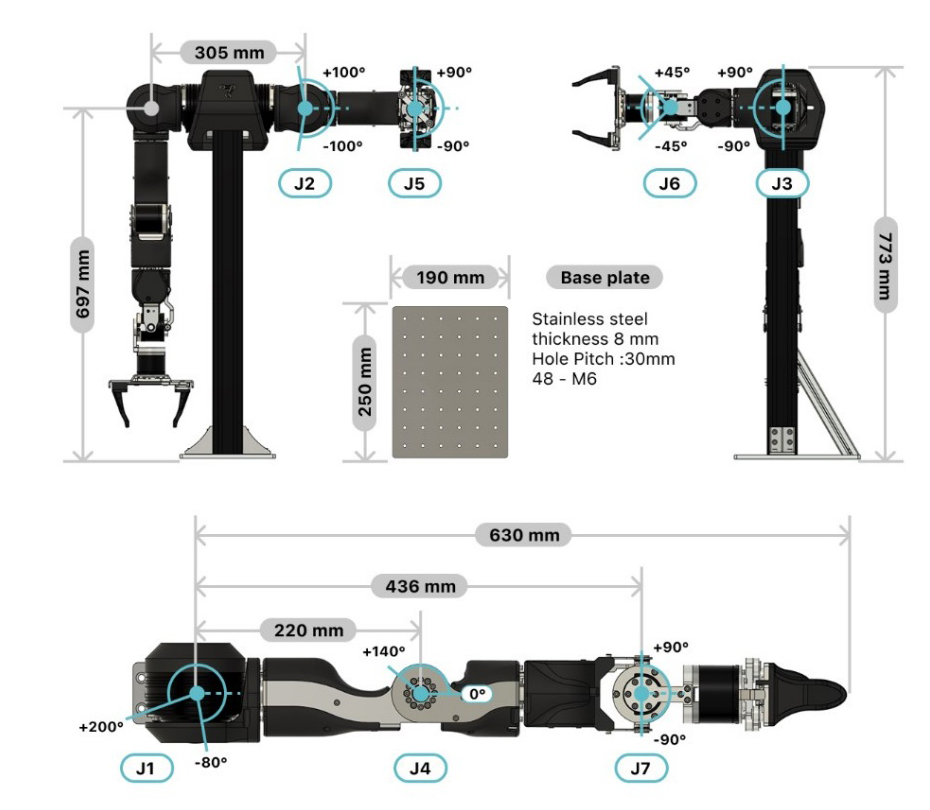
| 自由度 (片腕) | 7 DOF |
| 構成 | 双腕ロボットアーム |
| アームリーチ | 633 mm |
| 質量 (片腕) | 5.5 kg |
| 制御周波数 | 1 kHz CAN-FD |
| 定格可搬質量* | 4.1 kg |
| 最大可搬質量** | 6.0 kg |
| 関節 / グリッパー | モーターモデル | 定格トルク | 最大トルク |
|---|---|---|---|
| J1 | DM-J8009P | 20 Nm | 40 Nm |
| J2 | DM-J8009P | 20 Nm | 40 Nm |
| J3 | DM-J4340P | 9 Nm | 27 Nm |
| J4 | DM-J4340 | 9 Nm | 27 Nm |
| J5 | DM-J4310 | 3 Nm | 7 Nm |
| J6 | DM-J4310 | 3 Nm | 7 Nm |
| J7 | DM-J4310 | 3 Nm | 7 Nm |
| グリッパー | DM-J4310 | 3 Nm | 7 Nm |
機構設計から制御ソフトウェアまで公開されたオープンソース構成を採用しています。
研究内容に応じた構成変更や制御開発が行いやすく、独自アルゴリズムの検証を効率的に進められます。
単腕の産業用アームとは異なり、双腕かつ7自由度構成により人に近い動作の再現が可能です。
ヒューマノイド操作や複雑な作業動作の検証を行うための研究基盤として活用できます。
制御系にはCAN-FD通信を採用し、高速かつ安定した制御に対応しています。
出荷前に校正および通信確認が行われており、導入後すぐに安定した運用を開始できます。
試作機ではなく、量産を前提とした製造プロセスにより、耐久性と外観品質を両立しています。
研究用途においても長期運用を見据えた、安定した機構品質を確保できます。
配線接続部にはカスタム成形コネクタを採用しています。
繰り返し動作や長時間運用でも接続の安定性を保ちやすく、研究用途での信頼性向上につながります。
より手軽に導入できる関連モデルとして、WowRobo Roboticsの「SO-ARM101 DIY Kit」も取り扱っています。
ロボット学習や初期開発用途に適した製品です。

ロボットアームの構造や制御を学びながら活用できる、オープンソースベースの学習・開発向けロボットアームキット。
自分で組み立てたいユーザー向けのDIY版と、すぐに使用できる組立済み版が用意されており、用途や経験に応じて選べます。
このほかにもWowRobo Robotics製品を各種取り扱っております。
本ページに掲載していない製品についても、お気軽にお問い合わせください。
▶WowRobo Robotics製品一覧はこちら (メーカーページ)
「模倣学習 (Imitation Learning)」とは、人間の操作や行動を手本として、その動きを機械に学習させる手法です。ロボット分野では、遠隔操作などを通じて取得した関節角度や画像情報をもとに、状況に応じた動作を再現できるように学習を行います。複雑な作業でも細かなルールを一つひとつ設計せずに扱える点が特長です。OpenArm は、こうした模倣学習に必要な実機データの取得や検証に活用できます。
検索キーワード:
ロボットアーム研究用 / ヒューマノイドロボットアーム / 双腕ロボットアーム / オープンソースロボット / ロボティクス研究機材 / AIロボット開発 / 模倣学習ロボット / テレオペレーションロボット / 遠隔操作ロボットアーム / 強化学習ロボット実機 / 実機データ収集ロボット / 研究用ロボットプラットフォーム / ロボット制御開発環境 / CAN-FDロボット制御 / 高精度ロボットアーム / 7自由度ロボットアーム / 双腕協調ロボット / ヒューマノイド操作研究 / ロボットアーム開発キット / 物理AI研究機材
| 商品名 | 納品方法 | 納期 | 価格 |
| 弊社より配送 | お問い合わせください | お問い合わせください | |
| 弊社より配送 | お問い合わせください | お問い合わせください |
ご希望の商品にチェックを入れてボタンをクリックすることで、
該当商品をお見積もりフォームへ追加できます。
製品仕様・価格・導入手順など、お気軽にお問い合わせください
(通常、1営業日以内に回答いたします)
「探す」ページより、ご希望の商品を検索してください。
ご希望の商品が見つかりましたら、商品名をクリックし詳細ページをご覧ください。

表示された商品情報をご覧いただき、商品内容やエディション、価格などをご確認ください。
ご希望の商品名のチェックボックスにチェックを入れていただくと商品名がフォームに自動入力されます。

ここで商品名や数量、ご希望のオプションやその他のご要望、ご質問、
お客様情報など必要事項をご記入いただき、「送信する」ボタンを押してください。

お客さまからのお問い合わせを受理しだい、弊社スタッフよりお見積もりをメールにてお送りします。
お見積もり内容をご確認後、ご注文いただけるようでしたら、弊社からのお見積もりメールへのご返信にて、ご注文の旨をお知らせください。

ハードウェア、パッケージソフトウェア等は弊社より宅配便でお届けいたします。
ご注文いただいた商品がダウンロードソフトウェアやライセンス、レポート等の場合は「電子デリバリー」にてお届けいたします。

ご注文の流れの詳細はこちら
※ 返品・交換について
海外製品のため、ご注文後のキャンセル、ご返品はお受けできません。
ただし「納品後一週間以内」の初期不良品については、正常動作の同品もしくは同等品と無償交換させていただきます。
万一在庫切れの場合は同等品交換もしくは全額返金いたします。
ユニポスはOpenArm V1.1の調達販売を行い、海外製品調達に関するお困りごとを解決するサービスです。 詳しくはこちら。
納品・請求書による後払いです。
ご注文手続きはお見積もりメールへの返信のみでけっこうです。
ご注文の返信メールをいただいた後、弊社指定の銀行口座へのお振込みを確認した時点で注文の確定とさせていただきます。
※法人掛売りでのお支払いについては一定の条件がございます。
お支払い方法の詳細はお見積もりメールに記載しておりますので、ご確認ください。

Linker Hand シリーズ
高自由度制御 精密把持動作 多指ロボットハンド

OpenArm 2.0
双腕ヒューマノイド 視覚認識マニピュレーション 研究開発プラットフォーム
ODrive Pro / ODrive S1
高性能 DCモータコントローラ (ODrive Robotics)

Neobotix社製モバイルロボット
ロボットアーム搭載 自動輸送ロボット モバイルマニピュレータ

COEX Clover drone kit (ドローンキット)
プログラマブル クアッドコプター STEAM教育

TITA / Diablo
ダイレクトドライブ アクチュエータ モバイルロボット 車輪付き二脚