海外製品・コンサルテーションサービス UNIPOS(ユニポス) > ハードウェア > いま注目の商品 > Niryo Ned2 | 6軸制御 オープンソース ロボットアーム
Niryo Ned2 | 6軸制御 オープンソース ロボットアーム




- 高精度な位置制御による繊細な動作が可能な協働ロボット
- フランス Niryo社の開発する、6軸制御の教育・研究用オープンソース・ロボットアーム。
高い精度と再現性(0.5mm)、アルミニウム構造の採用による強固さとスムーズさが備わった協働ロボットです。
教育機関やメーカー、開発者など幅広いユーザー向けに設計されており、 ロボットを直接手で動かし動作を学習させるラーニングモードや、 Blocklyベースのオリジナルデスクトップアプリケーション(Niryo Studio)により、 プログラミングの知識がなくともロボットアームをコントロールすることが可能です (ROSやPython, C++でのプログラミングも可) 。
エンドエフェクタパーツを付け替えることで、様々なオブジェクトを取り扱うことができます。
New! (2024/2 追記)
■ 最新モデル「Ned3Pro」がリリースされました
Niryo Ned3 Pro | 6軸制御 プロフェッショナル向け 協働 ロボットアーム (Cobot)
主な用途
- ロボティクスや人工知能の研究開発
- 工学系の教育現場での次世代のロボティクスエンジニア育成
- 生産ラインでのピッキング等 工場作業の自動化 (FA)
検索キーワード:
ロボット / 協働ロボット / Collaborative Robot / コボット / STEAM / STEM / ロボットアーム / グリッパー / Gripper / FA / ファクトリーオートメーション / 工場自動化 / ラボラトリーオートメーション / 研究自動化 / 6自由度 / 6DoF
Nedのデモ機は「1週間」または「1か月」のトライアルが可能です。
詳しくは「レンタルサービスtegakari 予約販売フォーム」をご参照の上、お申し込みください。
 【テガラの研究開発向け ターンキーシステム】脳波測定デバイス(EMOTIV EPOC X)による外部デバイス(Niryo NED)操作のソフトウェア設計とアーキテクチャ事例
【テガラの研究開発向け ターンキーシステム】脳波測定デバイス(EMOTIV EPOC X)による外部デバイス(Niryo NED)操作のソフトウェア設計とアーキテクチャ事例

ユニポス取扱いの小型ロボットアームの一例ご紹介


- メーカー
- Niryo.
Niryo Ned2 | 6軸制御 オープンソース ロボットアームの見積もり・問い合わせ
「製品について」「導入までの流れ」「価格・お見積り」など、お気軽にお問合せ下さい。
| 商品名 | 納品方法 | 納期 | 価格 | |
|---|---|---|---|---|
| Ned2 (Niryo.) | 弊社より配送 | お問い合わせください | お問い合わせください | |
| Ned2 エンドエフェクタパーツ (ご希望の製品をお知らせください) | 弊社より配送 | お問い合わせください | お問い合わせください | |
| Ned2 Vision Set | 弊社より配送 | お問い合わせください | お問い合わせください | |
| Ned2 Conveyor Belt | 弊社より配送 | お問い合わせください | お問い合わせください | |
| 【TKS】脳波測定デバイスによる外部デバイス(Niryo NED)操作のソフトウェア設計とアーキテクチャ | 弊社より配送 | お問い合わせください | お問い合わせください | |
| サポートパック あんしんプラス(オプション) | 製品価格の5~10%/年 | |||
| サポートパック あんしんプラスとは? |
ご希望の商品にチェックを入れてボタンをクリックすることで、 該当商品をお見積もりフォームへ追加できます。納品方法については こちらをご覧ください。
Niryo Ned2 | 6軸制御 オープンソース ロボットアームの商品説明
Niryo Ned2
オープンソース技術に基づく、教育、研究、Industry 4.0向け6軸制御の協働ロボット(Cobot)。
Raspberry、Arduino、ROS(Robot Operating System)をベースしたロボットで、
高い精度と再現性(0.5mm)、スムーズな動きを実現するアルミニウム構造採用などにより、
産業の現場で必要とされる複雑な動きを再現できます。
ROSを使用して、シンプルなものから複雑なものまで、様々なプログラムを考案できます。
生産ラインでのロボット活用プロトタイピング(※)に適しています(Industry 4.0)。
※Ecosystem を併せてご利用いただくのがおすすめです(Ecosystemはこちら)
![]()


 |
旧モデル Ned からの主なアップデート箇所
・持続性: アルミニウム構造の堅牢性、0.5mmの精度 (precision)と再現性(repeatability)
・洗練されたデザイン: プラスチック射出成形カバーの採用
・静音性の向上: サイレントステッパーテクノロジーを搭載したサーボモータによる動作音の低減
・Raspberry Pi 4搭載: ARM V8 1.5GHz / 4GB RAM / Interface: USB3.0 up to 5 Gbps, WiFi 5
・装備: 2つのスピーカーとNed2の手首に装備されたコントロールパネル
Ned2の制御
・ロボットの手首にあるコントロールパネルで動作モードを選択(Freemotion mode)
・ビジュアルプログラミングBlocklyベースの Niryo Studio を使用した制御プログラム
・デジタル入出力を使用して、Arduino または Raspberry PiでNed2/Nedを制御
・ROSノードの開発(Python、C++)または、PythonAPIやModbusAPIを介して制御 など
Ned2 写真 (クリックで拡大します)

Ned2 / Ned (旧モデル) の仕様比較
| Ned2 | Ned (旧モデル) | |
| Number of axis | 6 | 6 |
| Weight | 7 kg | 6.5 kg |
| Payload | 300 g | 300 g |
| Max Reach | 440 mm | 440 mm |
| Precision | +/- 0.5 mm | 0,5 mm* |
| Repeatability | +/- 0.5 mm | 0,5 mm* |
| Power Supply | 12 Volts / 7Av | 11.1 Volts / 6A |
| Communication | GigE, WiFi 2,4GHz and 5GHz, USB2.0, USB3.0 | WiFi 2,4GHz and 5GHz, BT, USB |
| Interface/Programming | Windows/MacOS/Linux (desktop application) and APIs | |
| Materials | Aluminum, ABC-PC (injection moulding) | Aluminum, PLA (3D printing) |
| Ports | 1x Ethernet + 2x USB 3.0 + 2x USB 2.0 | |
| Hardware | Raspberry pi 4 Accelerometer and gyroscope in the control panel |
Raspberry pi 4 + 3x NiryoSteppers + 2x Dynamixel XL - 430 + 1x Dynamixel XL - 320 |
| Human-Machine interface | LED Ring, Speakers, Microphone | - |
| Collision detection sensor | Magnetic sensor (on motor) | |
* 精度と再現性 : Ned は教育・研究用を目的としたロボットであるため、産業用アプリケーションの精度と堅牢性を保証していません
----------------------------------------------
エンドエフェクタパーツ
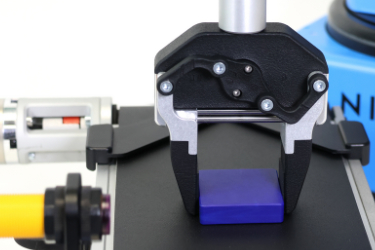
Ned2 には 様々な対象を取り扱うことのできる Custom Gripperが付属します。
その他のパーツについては、別途ご購入いただくオプション品となります。
ご希望の際にはお知らせください。
※各パーツの詳細はメーカーページにてご確認ください

・Custom Gripper (Ned2 デフォルトパーツ)
jaws-先端部分を自由に取り換えることが可能なグリッパー

・Large Gripper
大きなオブジェクトを掴むのに適したグリッパー

・Adaptive Gripper
カップや卵など丸いオブジェクト および 壊れやすいオブジェクトを掴むのに適したグリッパー

・Vacuum Pump
掴むことが難しいオブジェクトを「吸引」により取り上げるためのパーツ
箱のふたを持ち上げたり大きく平らなオブジェクトを取り上げるのに最適

・Electro magnet
金属パーツなどを「磁力」で取り上げるためのパーツ
----------------------------------------------
Ecosystem
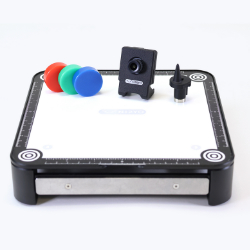

■ Vision Set / メーカー詳細ページ
色と形状に基づいたオブジェクトの検出や、対象物の選択機能をNed に付与することのできるモジュールセット。
アームに取り付けるカメラ、ピッキングのシミュレーションに最適な 色や形が異なるオブジェクトのセット、
オブジェクトを任意の位置に配置・固定することのできるワークスペース(台)などが含まれています。
Niryo Studio の Blocky インターフェースを用いることで、
ピッキングのような複雑な機能も、簡単に実現することができます
(TCPスクリプトを使用することも可能です)。

■ Conveyor Belt / メーカー詳細ページ
生産ラインを再現することのできるベルトコンベアー。
前進・後退 双方向に動かすことができ、スピード調整もできます。
付属するコントローラーモジュールを利用することで、
Niryoシリーズ本体無しで、コンベアーを自律的に制御することも可能です。
【テガラの研究開発向け ターンキーシステム】脳波測定デバイス(EMOTIV EPOC X)による外部デバイス(Niryo NED)操作のソフトウェア設計とアーキテクチャ事例
----------------------------------------------

【販売終了モデル】
![]()

 ※右:アルミニウム構造部分のイメージ ※右:アルミニウム構造部分のイメージ |
前モデル Niryo One からの主なアップデート箇所
・高度な用途に対応: 動作を再現する 0.5mmの精度(precision)と再現性(repeatability)
・アルミニウム構造: 堅牢かつロボットプロジェクトで必要とされるスムーズな動作を実現
・Raspberry Pi 4搭載: 64-bit ARM V8 / 2GB RAM / Interface: USB3.0, WiFi, Bluetooth 5.0
Nedの制御
・ビジュアルプログラミングBlocklyベースの Niryo Studio を使用した制御プログラム
・デジタル入出力を使用して、Arduino または Raspberry PiでNedを制御
・ROSノードの開発(Python、C++)または、PythonAPIやModbusAPIを介して制御
・Xboxコントローラで操作 など
Ned 写真 (クリックで拡大します)






■ Ned用エンドエフェクタパーツ

・Custom Gripper (Ned デフォルトパーツ)
jaws-先端部分を自由に取り換えることが可能なグリッパー (3Dプリンタで自作したパーツも利用可能)

・Custom Gripper Jaws pack
Custom Gripper 用の取り換えパーツ 3種類のセット
Flat Jaws : スポンジボールのような大きくやわらかいものを掴むのに適したパーツ
Precision Jaws : 狭いところや物と物の間に配置されている小さなものを掴むのに適したパーツ
XL Jaws : 大きなものを掴むのに適したパーツ

・Large Gripper - Ned
大きなオブジェクトを掴むのに適したグリッパー

・Adaptive Gripper - Ned
カップや卵など丸いオブジェクト および 壊れやすいオブジェクトを掴むのに適したグリッパー

・Vacuum Pump - Ned
掴むことが難しいオブジェクトを「吸引」により取り上げるためのパーツ。
箱のふたを持ち上げたり大きく平らなオブジェクトを取り上げるのに最適

・Electromagnet - Ned
金属パーツなどを「磁力」で取り上げるためのパーツ
メーカー
-
Niryo.
https://niryo.com/
動画
Say hello to Ned2, Niryo's new six-axis cobot.
ご注文の流れ

- 商品詳細をご確認の上「今すぐお見積もり・お問い合わせ」ボタンをクリック
- 見積もりフォームへ必要事項を記載の上、送信ください
- 弊社よりメールにてお見積りをご提示します
- メールへの返信にてご注文の旨をお知らせください
- 商品代金のお支払いをお願いします(次項の「支払い方法」をご覧ください)
- 配送、またはメール(電子デリバリー)にて商品をお届けします
支払い方法
- 法人掛売り(※) :
納品・請求書による後払いです。
ご注文手続きはお見積もりメールへの返信のみでけっこうです。 - 銀行振込:
ご注文の返信メールをいただいた後、弊社指定の銀行口座へのお振込みを確認した時点で注文の確定とさせていただきます。
※法人掛売りでのお支払いについては一定の条件がございます
お支払い方法の詳細はお見積もりメールに記載しておりますので、ご確認ください。
Niryo Ned2 | 6軸制御 オープンソース ロボットアームの見積もり・問い合わせ
「製品について」「導入までの流れ」「価格・お見積り」など、お気軽にお問合せ下さい。
| 商品名 | 納品方法 | 納期 | 価格 | |
|---|---|---|---|---|
| Ned2 (Niryo.) | 弊社より配送 | お問い合わせください | お問い合わせください | |
| Ned2 エンドエフェクタパーツ (ご希望の製品をお知らせください) | 弊社より配送 | お問い合わせください | お問い合わせください | |
| Ned2 Vision Set | 弊社より配送 | お問い合わせください | お問い合わせください | |
| Ned2 Conveyor Belt | 弊社より配送 | お問い合わせください | お問い合わせください | |
| 【TKS】脳波測定デバイスによる外部デバイス(Niryo NED)操作のソフトウェア設計とアーキテクチャ | 弊社より配送 | お問い合わせください | お問い合わせください | |
| サポートパック あんしんプラス(オプション) | 製品価格の5~10%/年 | |||
| サポートパック あんしんプラスとは? |
ご希望の商品にチェックを入れてボタンをクリックすることで、 該当商品をお見積もりフォームへ追加できます。 納品方法についてはこちらをご覧ください。
ユニポスはNiryo Ned2 | 6軸制御 オープンソース ロボットアームの調達販売を行い、海外製品調達に関するお困りごとを解決するサービスです。 詳しくはこちら。
Niryo Ned2 | 6軸制御 オープンソース ロボットアームをご覧の方におすすめの商品
-

多様なロボットブランドに対応した産業用ロボットのための総合ソリューション
RoboDK | 産業用ロボット シミュレーション プログラミング ソフトウェア -

STEAM教育対応。学習用途に最適な低コストロボットAIシステム
Stationary AI | Trossen 両手遠隔操作 オープンソース ロボットアーム -

高精度で柔軟な操作を実現する研究用マニピュレーターアーム
WidowX AI | Trossen AI対応 6軸ロボットアーム -

様々な業界における反復作業を自動化する協働ロボットアーム
Niryo Ned3 Pro | 6軸制御 プロフェッショナル向け 協働 ロボットアーム (Cobot) -

人間支援・AI研究向けの高性能モバイルマニピュレータ
Hello Robot Stretch 3 | 腕 移動ロボット 研究向 モバイルマニピュレータ -

このメーカーの他の商品を見る
Niryo Ned2 | 6軸制御 オープンソース ロボットアームレビュー
返品・交換について
海外製品のため、ご注文後のキャンセル、ご返品はお受けできません。
ただし「納品後一週間以内」の初期不良品については、正常動作の同品もしくは同等品と無償交換させていただきます。万一在庫切れの場合は同等品交換もしくは全額返金いたします。