海外製品・コンサルテーションサービス UNIPOS(ユニポス) > ハードウェア > ロボティクス > D'Kitty | 移動の研究 ベンチマーク 取得 四足歩行 ロボット
D'Kitty | 移動の研究 ベンチマーク 取得 四足歩行 ロボット
- 移動の研究とベンチマーク取得のための四足歩行ロボット
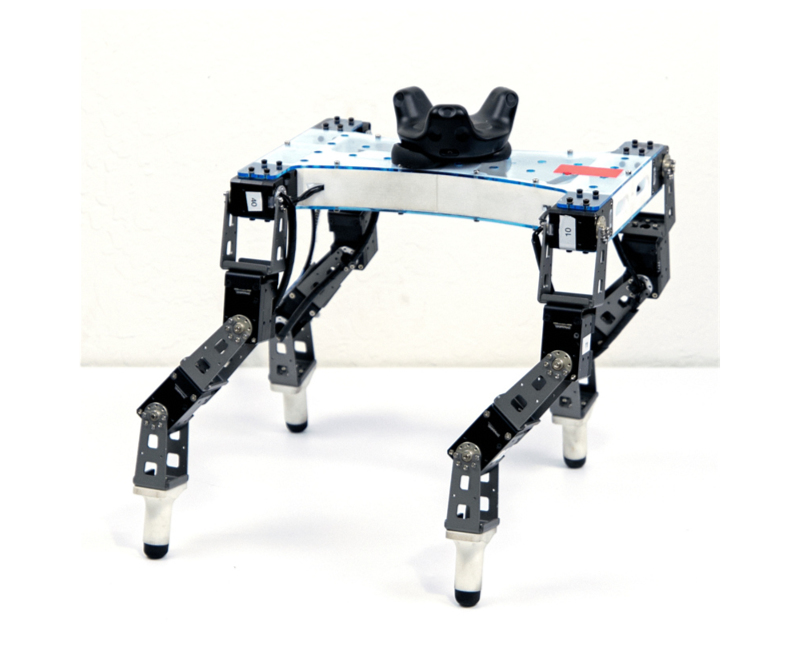
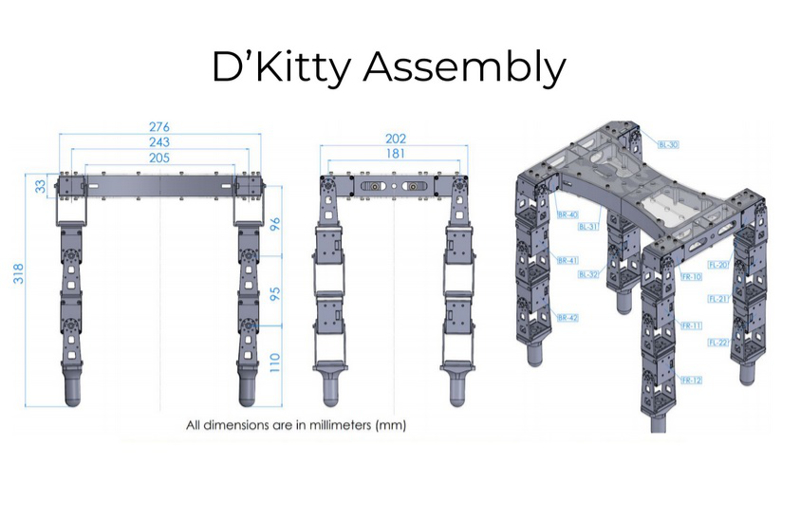
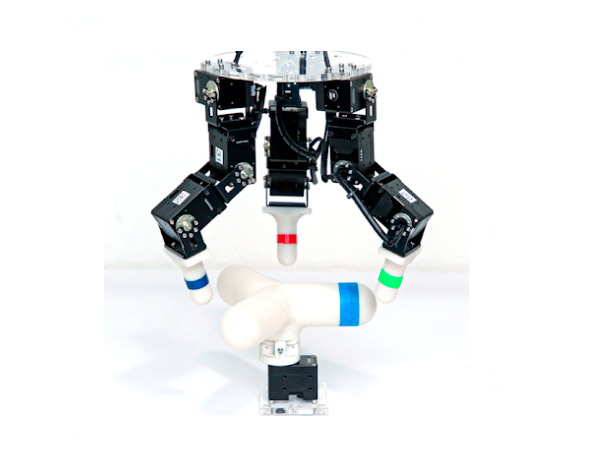
- D'Kittyは、12個の関節部位を持ち、自由度が高く、機敏な移動ができる、四足歩行ロボットです。
本体中心部の四角いベース型の胴体に取り付けられた対称的な4つの脚、 そして、胴体の位置と方向を測定する外部追跡システム(OpenVR)で構成されています。
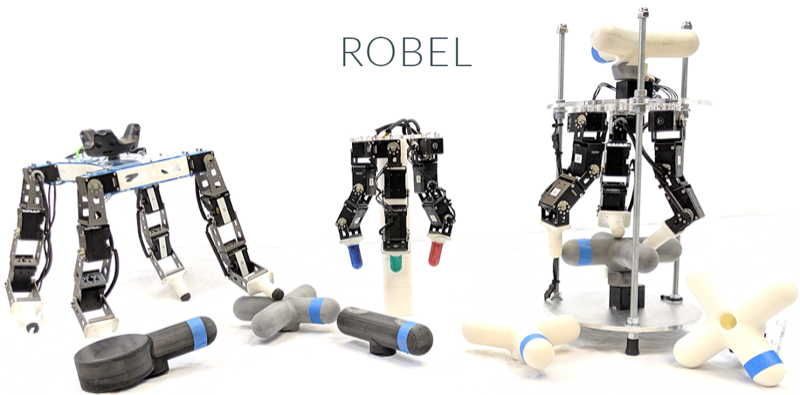
Google Brain Teamにより開発されたベンチマーク用ロボット ROBEL (Robotics Benchmarks for Learning)の一つで、 堅牢・低コスト、かつ簡単に組み立てることができるロボットながらも制御・学習のためのベンチマークを取得することができます。
様々なシミュレーションに対応しており、ナビゲーションと操作性も高く、ロボット制御の問題解決に役立ちます。

移動運動性能探求のための D'Kitty、操作性探求のための D'Claw は 販売中止となりました(2022年6月)。
検索キーワード; VIVEトラッカー / 追跡ソリューション / ROBEL Robotic / RObotics BEnchmarks for Learning / Sim2Real / 深層強化学習 / MuJoCo simulation / D'Claw / ベンチマークロボット

教育用ロボット関連製品の一覧はこちら
- メーカー
D'Kitty | 移動の研究 ベンチマーク 取得 四足歩行 ロボットの見積もり・問い合わせ
「製品について」「導入までの流れ」「価格・お見積り」など、お気軽にお問合せ下さい。
| 商品名 | 納品方法 | 納期 | 価格 | |
|---|---|---|---|---|
| D'Kitty | 弊社より配送 | 販売中止 |
ご希望の商品にチェックを入れてボタンをクリックすることで、 該当商品をお見積もりフォームへ追加できます。納品方法については こちらをご覧ください。
D'Kitty | 移動の研究 ベンチマーク 取得 四足歩行 ロボットの商品説明
ROBEL オープンソース プラットフォーム / 詳細
・D'Claw … 操作性の探求のためのロボット / 販売中止
・D'Kitty … 移動運動性能の探求のためのロボット / 販売中止
【お取り扱い実績の例】
D'Kitty / 詳細
動作/シミュレーション環境:

・Walking in clutter : 障害物を乗り越えて歩行する (MuJoCo simulation* 等)
・Walking through obstacles :障害物を押し通しての歩行 (MuJoCo simulation* 等)
・Gravel & branches : 歩行場所(砂利や枝) (MuJoCo simulation* 等)
・Slope & grass : 歩行場所(坂や草) (MuJoCo simulation 等)
・Avoid Moving Obstacles : 動く障害物を避けながらの歩行
・Push to Moving Goal :対象物の移動
・Co-ordinate : 対象物を特定の場所(指定場所)へ移動
ROBELには、VIVEトラッカーに基づく追跡ソリューションがパッケージ化されており、
別の追跡ソリューションも使用できます。
* 物理演算エンジンソフトウェア MuJoCo もお取り扱いございます
セット内容
- DYNAMIXEL XM430-W210-R x 12
- DYNAMIXEL U2D2 x 1
- 6 Port RX/EX Power Hub x 1
- HN12-I101 Set x 12
- FR12-H103GM Set x 9
- Turbo Lock
- Nuts & Bolts for assembly
※一部、パーツの自作が必要となります
D'Kitty will require additional 3D printed / laser cut pieces to assemble,
for more information please refer to
the D'Kitty Parts and Assembly Files
D'Kitty 構成パーツ (クリックで拡大します)






動画
ご注文の流れ

- 商品詳細をご確認の上「今すぐお見積もり・お問い合わせ」ボタンをクリック
- 見積もりフォームへ必要事項を記載の上、送信ください
- 弊社よりメールにてお見積りをご提示します
- メールへの返信にてご注文の旨をお知らせください
- 商品代金のお支払いをお願いします(次項の「支払い方法」をご覧ください)
- 配送、またはメール(電子デリバリー)にて商品をお届けします
支払い方法
- 法人掛売り(※) :
納品・請求書による後払いです。
ご注文手続きはお見積もりメールへの返信のみでけっこうです。 - 銀行振込:
ご注文の返信メールをいただいた後、弊社指定の銀行口座へのお振込みを確認した時点で注文の確定とさせていただきます。
※法人掛売りでのお支払いについては一定の条件がございます
お支払い方法の詳細はお見積もりメールに記載しておりますので、ご確認ください。
D'Kitty | 移動の研究 ベンチマーク 取得 四足歩行 ロボットの見積もり・問い合わせ
「製品について」「導入までの流れ」「価格・お見積り」など、お気軽にお問合せ下さい。
| 商品名 | 納品方法 | 納期 | 価格 | |
|---|---|---|---|---|
| D'Kitty | 弊社より配送 | 販売中止 |
ご希望の商品にチェックを入れてボタンをクリックすることで、 該当商品をお見積もりフォームへ追加できます。 納品方法についてはこちらをご覧ください。
ユニポスはD'Kitty | 移動の研究 ベンチマーク 取得 四足歩行 ロボットの調達販売を行い、海外製品調達に関するお困りごとを解決するサービスです。 詳しくはこちら。
D'Kitty | 移動の研究 ベンチマーク 取得 四足歩行 ロボットをご覧の方におすすめの商品



このメーカーの他の商品を見る
D'Kitty | 移動の研究 ベンチマーク 取得 四足歩行 ロボットレビュー
返品・交換について
海外製品のため、ご注文後のキャンセル、ご返品はお受けできません。
ただし「納品後一週間以内」の初期不良品については、正常動作の同品もしくは同等品と無償交換させていただきます。万一在庫切れの場合は同等品交換もしくは全額返金いたします。